*본 글은 cs231n 12강의 내용을 정리 요악한 글입니다.
오늘은 ConvNet내부에서 어떤 일들이 벌어지는지 예쁘고ㅎㅎ 다양한 시각자료를 활용해 알아보겠습니다.
CNN이 비난 아닌 비난(?)을 받는 가장 큰 이유는 바로 Black Box Problem때문입니다.
Black-Box Problem이란 말 그대로 CNN안에서 일어나는 과정이 마치 Black Box안에 들어있는거같다는 비유로 붙혀진 이름입니다.
모델을 작성한 당사자도 CNN안에서 어떤 과정을 거쳐서 학습이 되는지 정확히 알 수가 없다는 문제가 있죠.
12강에서는 이런 문제점들에 맞서 CNN의 중관 과정들을 좀 더 직관적으로 나타내는 방법들을 배웁니다.
그 중에서도 input output과 직접적인 연관이 있는 first & last layer들을 먼저 살펴봅시다.
First Layer
이미지의 raw pixel들을 받아서 처리하는 첫번째 레이어를 자세히 들여다 보면 아래 그림과 같은 결과를 얻을 수 있습니다.

First Layer는 Image raw pixel에 W를 내적해서 feature map을 생성하고, 이때 W는 64x3x11x11의 사이즈를 가집니다.
W vector를 64개의 11x11 RGB 이미지로 변환하면 위와 같은 결과가 나옵니다. (trained된 W)
언뜻 보면 격자무늬나 직선의 이미지들이 잔뜩 있는것을 볼 수있는데 이는 first layer의 Weight가 Edge와 Corner를 찾는다고 이해할 수 있습니다.
잠깐 Filter가 왜그렇게 해석이 되는지에 대해 간단히 설명해보자면~
Filter는 곧 이미지에서 무엇을 찾는지로 연결이 됩니다.
아래와 같은 filter가 있고 동일 사이즈의 img가 4개 있다고 했을때, convolution한 값이 가장 큰 건 몇번일까요?


왼쪽부터 차례대로 6, 6, 18, 6이 나오고 가장 큰 건 3번째가 됩니다.
결국, Filter와 비슷한, 겹치는 형태를 띌수록 inner product 내적의 결과가 큰 값이 나올 확률이 높아집니다.

다시 돌아와서, first layer를 다시 보면, 엣지 성분이 많이 검출되는 것을 확인할 수 있고
첫번째 layer에 한해서 유의미한 결과를 해석해낼수 있다고 볼 수 있습니다.
하지만 Intermediate layer부턴 뭔가 이상해집니다. input은 채널수가 3(RGB) or 1(BW)이기 때문에 filter도 동일한 채널사이즈를 갖지만, AlexNet만해도 2번째 layer부터는 채널사이즈가 16으로 대폭 상승합니다.

20x16x7x7을 어찌저찌 잘 나눠서 7x7x1(BW)filter 16개의 묶음 x 20개 로 시각화해도 크게 의미있는 경향은 찾아볼 수 없습니다.
첫번째 레이어는 input이미지에 직접적으로 연결되어 있지만 두번째 레이어 부터는 이전 레이어의 activation map과 연결되어 있기 때문에 interpretable하지 않습니다.
Last Layer - Nearest Neighbor

마지막 Layer에서도 유의미한 결과를 확인할 수 있습니다.
보통 Image Classification에서 마지막 layer은 dimension을 class의 개수로 축소해주는 fully-connected layer로, 위의 그림(Alexnet)에서는 마지막 fc-layer에 입력이 되는 vector가 4096 - D입니다.
이렇게 input이미지부터 여러 layer를 거친 마지막 4096-D vector(=feature)들로 L2 Nearest Neighbor를 수행하면 비슷한 vector들끼리 묶이는데, 각 vector의 입력이미지를 모았더니 아래와 같은 결과가 나왔습니다.
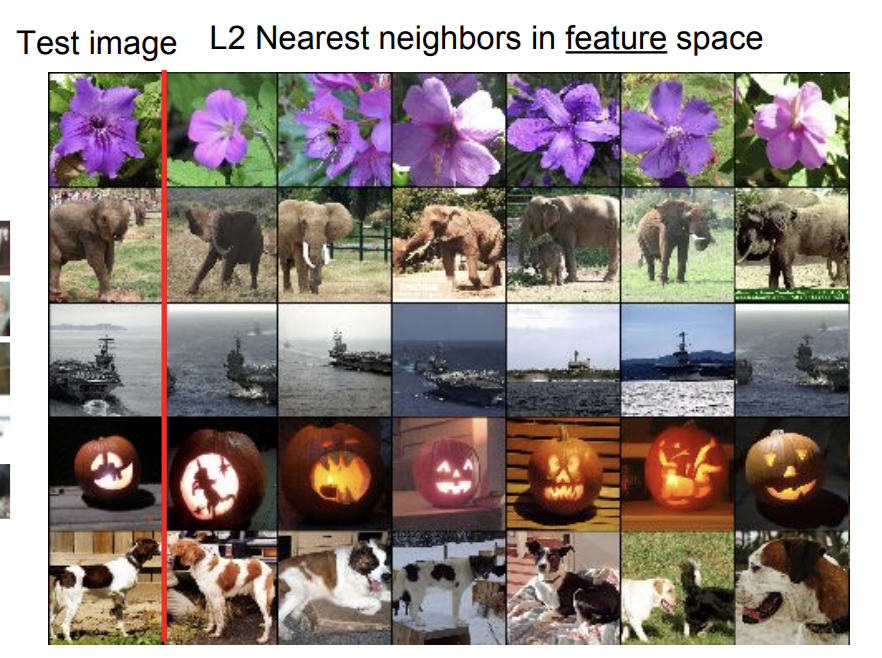
feature가 유사한 이미지들은 실제로 비슷한 이미지였다는걸 알 수 있습니다.
놀라운 점은 두번째 줄의 경우, test image의 코끼리는 오른쪽을 향하고 있고, 다른 코끼리들은 정면을보거나 왼쪽을 보고 있다는 것입니다. 마지막줄의 강아지도 마찬가지입니다.
단순히 pixel끼리 분석해서 얻을 수 없는, 물체가 무엇인지 feature들이 이해하고 있다는것을 알 수 있게 해준 실험입니다.
Last Layer - Dimensionality reduction

이번에는 마지막 layer의 4096 vector를 PCA로 군집화 시켰습니다.
PCA는 차원축소의 일종으로 여기서는 4096 차원이 vector를 x,y 2차원으로 축소해 좌표평면에 나타냈습니다.
그 결과, 같은 class들의 이미지들끼리 가깝게 분포함을 확인할 수 있습니다.
Last Layer - tSNE
강의에서 가볍게 언급하고 넘어간 tSNE에 대해서 간단하게 설명하면,
SNE는 Stochastic Neighbor Embedding의 약자로 고차원의 원공간에 존재하는 데이터 x의 이웃간 거리를 최대한 보존하는 저차원의 y를 학습하는 방법입니다. SNE는 가우시안 확률분포를 전제하고, t분포를 사용하면 t-SNE가 됩니다.
자세한건 ☞ t-SNE ☜ 잘 정리된 블로그를 참고해주세요.
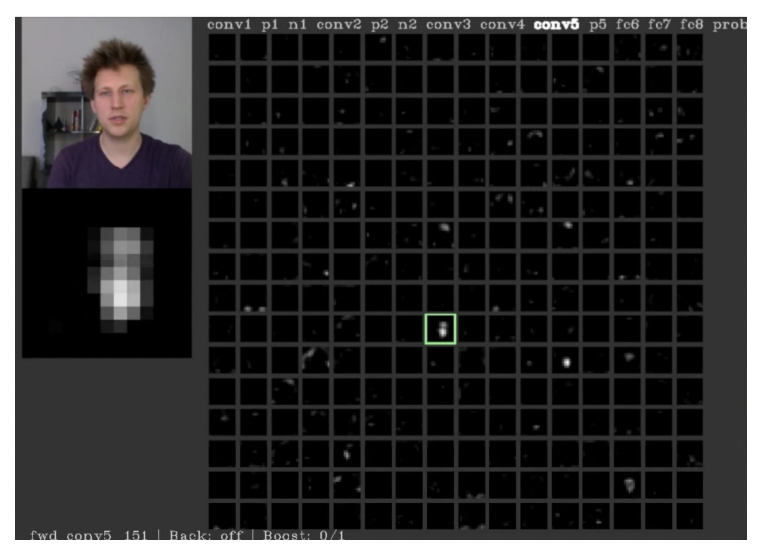
Visualizing Activations
앞서 말했듯이 intermediate layer들은 input에 직접적으로 연결되어있는게 아니기 때문에 인간이 해석하기가 쉽지 않다고 했습니다. 하지만 얻어걸린건지 아닌지는 모르겠지만 AlexNet의 conv5 activation map에서, 사람사진을 입력했을때 얼굴의 모양과 위치가 비스무리한 image를 확인할 수 있었다고 합니다.
Maximally Activating Patches
Maximally Activation Patches는 input 이미지의 어떤 patch(부분, crop)이 neuron을 가장 활성화 시키는지를 확인하는 방법입니다.
강의에서는 AlexNet의 conv5 layer을 예시로 설명했는데, conv5 layer는 128x13x13의 feature map을 output합니다.
이중에서 임의로 하나의 채널을 고릅니다. 128개의 채널중에 17번째 채널을 골랐다 치면, 13x13의 feature map이 나옵니다.
이제 input에서부터 network를 쭉 통과시키며 conv5의 17번째 layer에서 가장 높은 값을 나타낸 위치를 찾고, 그 지점에서부터 receptive field들을 쭉 거슬러 올라 input에서 나타냈더니 아래와 같은 결과가 나왔습니다.

여기서 알 수 있는것은 특정 layer의 특정 neuron에서 어떤 feature들을 찾고 있는지에 대한 대략적인 아이디어입니다.
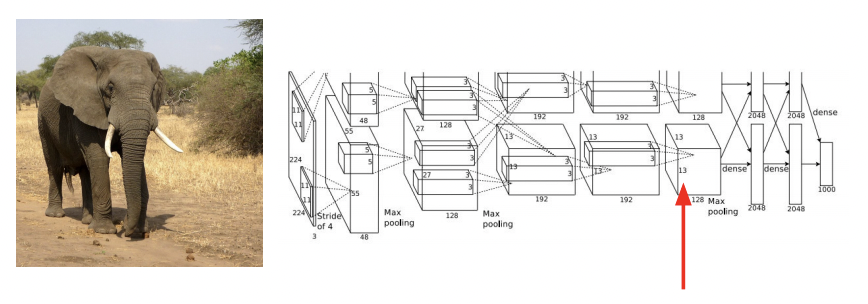
Occlusion Experiments
Occlusion Experiment는 이미지의 어떤 부분을 가렸을때 예측 성능이 얼마나 줄어드는지를 heatmap으로 나타낸것입니다.
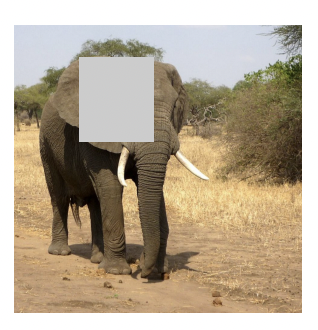
왼쪽같이 코끼리 이미지에서 이마, 귀 부분을 가리면 예측 성능에 어떤 변화가 있을까요?
가리는 부분을 옮겨가면서 어떤 변화가 있는지 측정을 해서 heatmap으로 나타내 봅시다.

heatmap에서 색깔이 진할 수록 예측확률이 떨어지는것을 의미합니다. 따라서 진한 부분일 수록 예측에 critical한 역할을 합니다.
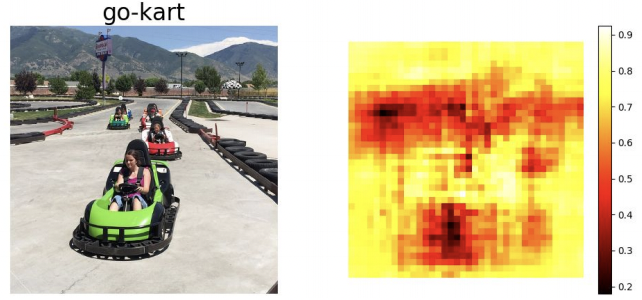
go-kart예시를 보면 확 와닿는게, 맨 앞에 있는 카트를 가리면 예측성능이 확 줄어듭니다.
카트라고 이미지를 분류하는 과정에서 go-kart가 실제로 예측에 사용되는것을 알 수 있습니다.
Saliency Maps
saliency는 한국어로 '가장 중요한, 핵심적인; 가장 두드러진, 현저한' 등의 뜻을 가지는 단어입니다.
Saliency Map은 이미지의 어떤 pixel이 classification에 영향을 줬는지 체크합니다.
각 픽셀별로 결과에 얼마나 영향을 끼치는지 Gradient Descent방식으로 접근해 영향력이 큰 pixel들을 찾아냅니다.

Intermediate Features via guided BackProp
Guided Backpropagation도 위에서 본것과 마찬가지로 중간의 뉴런을 골라서 이미지의 어떤 patch가 영향을 크게 줬는지를 확인합니다.
이때 비슷한 실험을 굳이 Guided Backpropagation을 사용하면서 실험하는 데서 오는 장점은, patch 내부에서도 '어떤 픽셀'이 크게 영향을 줬는지 알 수 있기 때문입니다.

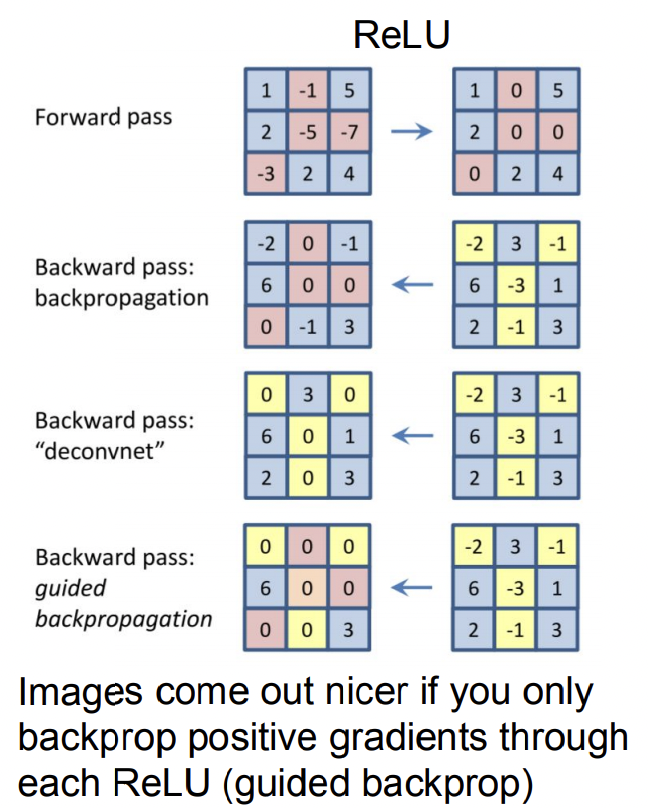
1. Forward Pass ( RELU )
: Relu를 활성화 함수로 사용해 0 이하 값들은 전부 0이됩니다.
2. Backward Pass: Back Propagation
: 구해진 Gradient들 중 ReLU를 활성화했던것들에만 값을 그대로 전달.
(ReLU Gradient 전달 과정 참고)
3. Backward Pass: "deconvnet"
: gradient가 음수면 backward pass하지않고 0 전달, 양수면 그대로 전달
4. Backward Pass: Guided Back Propagation
: 기존의 Back Propagation + deconvnet
이 경우에는 ReLU활성화 안된거도 0, gradient값 음수인거도 0으로 전달
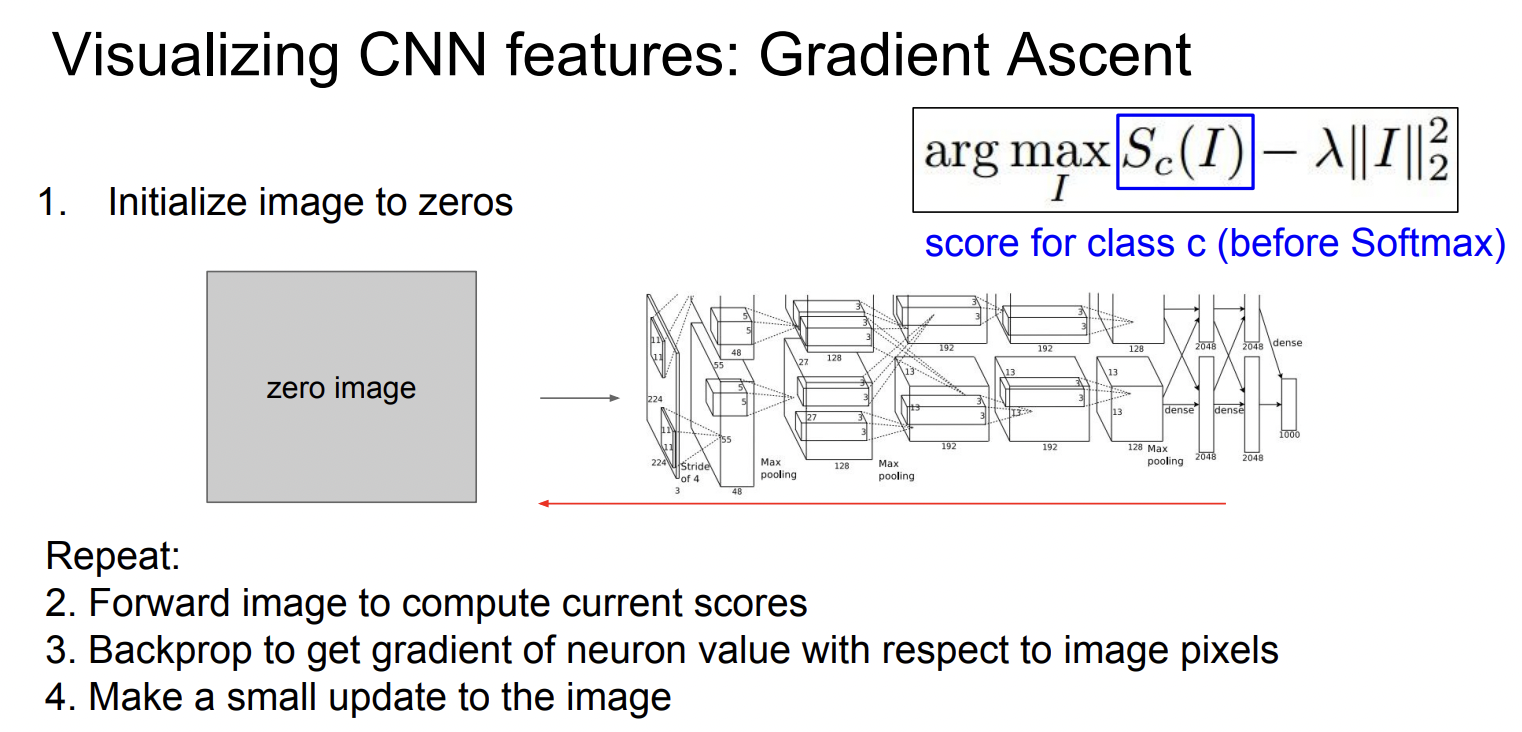
Visualizing CNN features: Gradient Ascent
위에서 다룬 거의 모든 실험적 방법들은 전부 어떤 이미지 I의 어떤 부분, 요소들이 neuron을 활성화하는지, input이미지에 따라 다 다른 결과가 나왔습니다. (이미지에 상당히 rely하는 방법이라고 할 수 있습니다.)
그렇다면 반대로 어떤 neuron(weight)이 주어졌을때 그 neuron을 활성화 시키는 generalized한 image는 어떤게 있을까요?
이를 알아보기 위해 Gradinet Ascent를 진행합니다.
※ Gradient Ascnet는 말 그대로 Loss가 최대가 되는 Parameter를 찾는 방법입니다.
※ 고정된 W에 대해 input image의 pixel value를 gradient ascent로 바꿔가면서 neuron이나 class score를 극대회 시키는것.
$$I^* = arg max_I f(I) + R(I)$$
※ Regularization R(I)가 필요. Generated Pixel들이 network에 overfitting되지 않도록 하기 위해서 꼭 필요!
실험 결과는 아래와 같습니다. 아래 이미지들은 Gradient Ascent를 통해 뉴런을 최대로 활성화 시키는 합성 이미지들입니다.
이제 중요한 Feature 들을 부각시켜 볼 수 있습니다

여기에 추가로 아래 Regularization들을 더하면 결과가 더 좋아진다고 합니댜.
- Gaussian Blur Image
- Clip pixels with small values to 0
- Clip pixels with small gradient to 0
Fooling Images / Adversarial Examples
이번에는 하나의 class가 다른 class로 classify 되도록 image를 계속 update하면 어떤 결과가 나오는지 살펴봅시다.
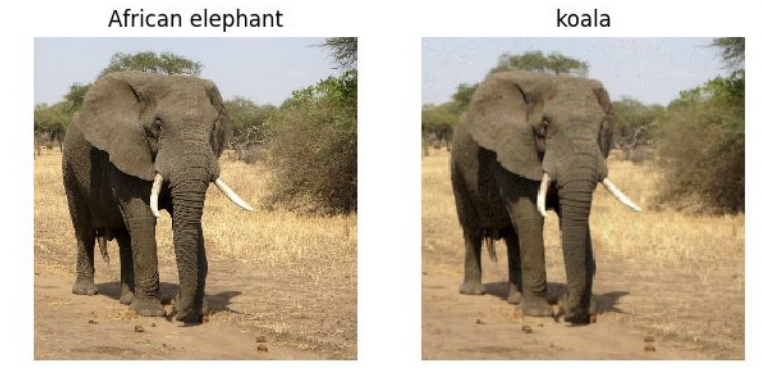
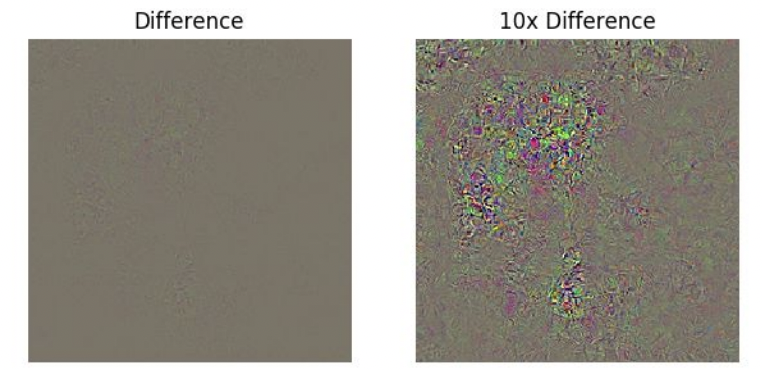
코끼리가 두마리 있습니다. 근데 왼쪽은 코끼리로 정확한 classification이 됐지만 오른쪽은 koala로 classify 됐네요.
어떻게 된 일일까요?
이 두 이미지의 pixelwise 차이(Difference)를 보면 큰 차이가 있지는 않습니다. 그러나 차이를 10배로 magnify하면 차이가 나타나지만, koala같은 모양이나 elephant같은 모양같이 의미있는 형태라기보단 노이즈가 보일 뿐입니다.
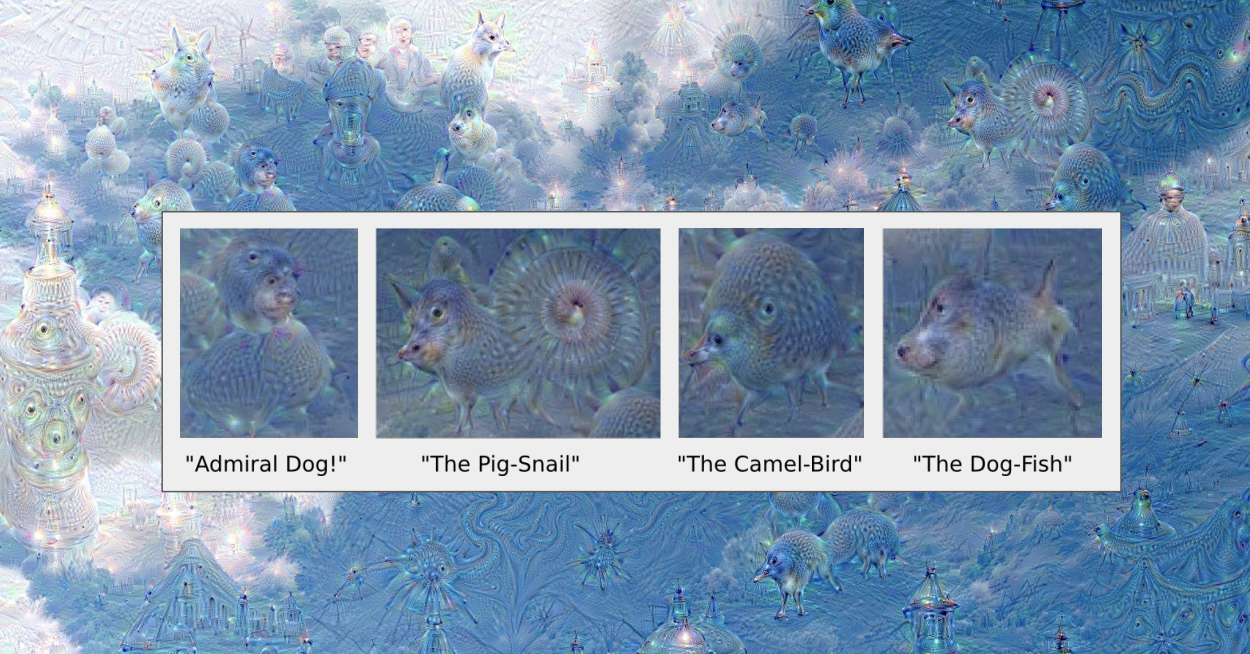
DeepDrean: Amplify existing features
DeepDream은 구글에서 만든것으로, 거의 entertainㅣ묟ㄱ? 눈호강 + feature들이 무엇을 찾는지를 대략적으로 파악할 수 있게끔 만든 것입니다.
과정 :
- image와 CNN의 한 layer를 선택한다.
- layer까지 forward pass하고 activation을 계산한다.
- layer의 gradient를 activation과 같게 설정한다. (amplify neuron activations)
- Backward pass, update image.
위에서는 특정 neuron을 maximaize하는 방향으로 시각화를 했다면,
Deep Dream은 neuron activations를 증가시키는 방향의 차이가 있습니다.
Feature Inversion
Feature Inversion은 CNN에서 구한 feature들만으로 통해 역으로 input이미지를 생성하는 방법입니다.

여기서 input x*는 주어진 feature와 새롭게 생성할 이미지의 feqture간의 간극을 최소화 시키는 방향으로 gradient ascent 됩니다.
Texture Synthesis
Given a sample patch of some texture, can we generate a bigger image of the same texture?
Texture Synthesis는 꼭 Neural Network를 통해서만 할 수 있지 않고 다른 방법들로도 할 수 있습니다. Nearest Neighbor 등등,,
강의는 Computer Vision강의이기 때문에 NN 방법론에 대해 자세히 다루진 않습니다.

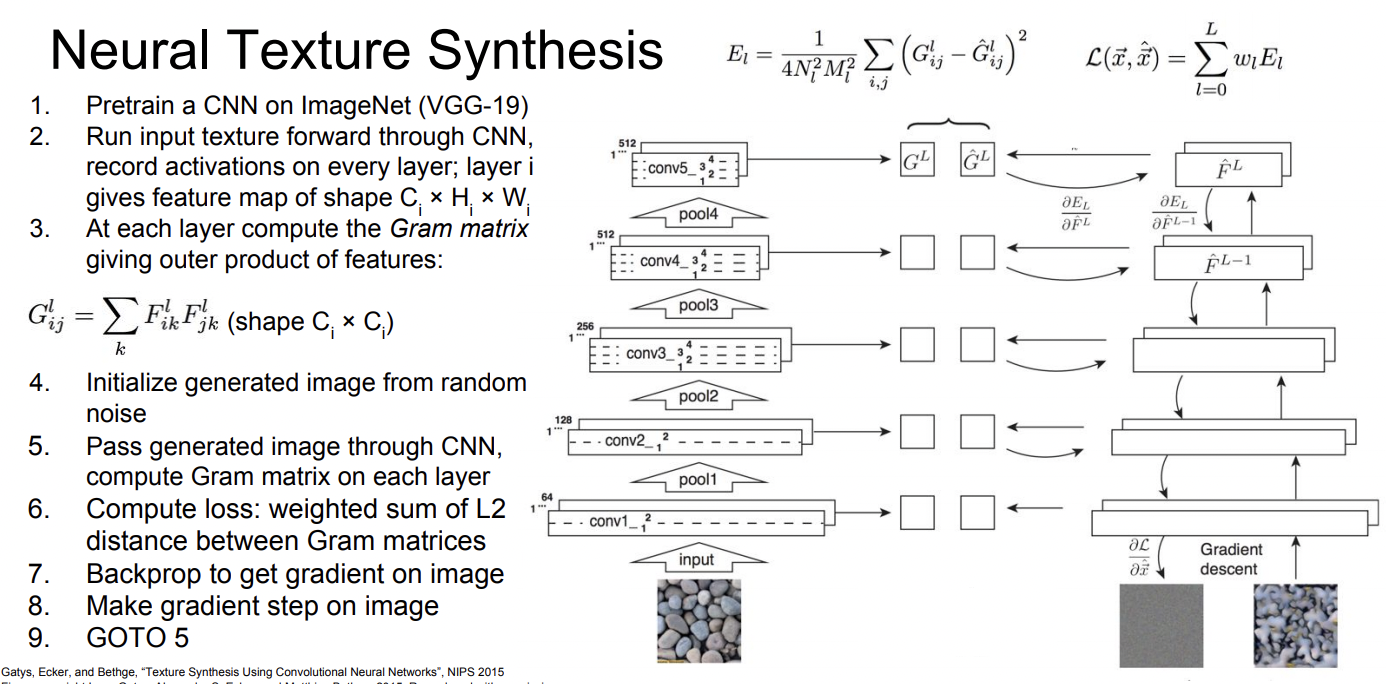
Gram Matrix (Somewhat Gradient Acsent-ish?)
Texture Synthesis를 NN을 적용해 하기 위해서는 Gram Matrix라는것을 사용합니다.
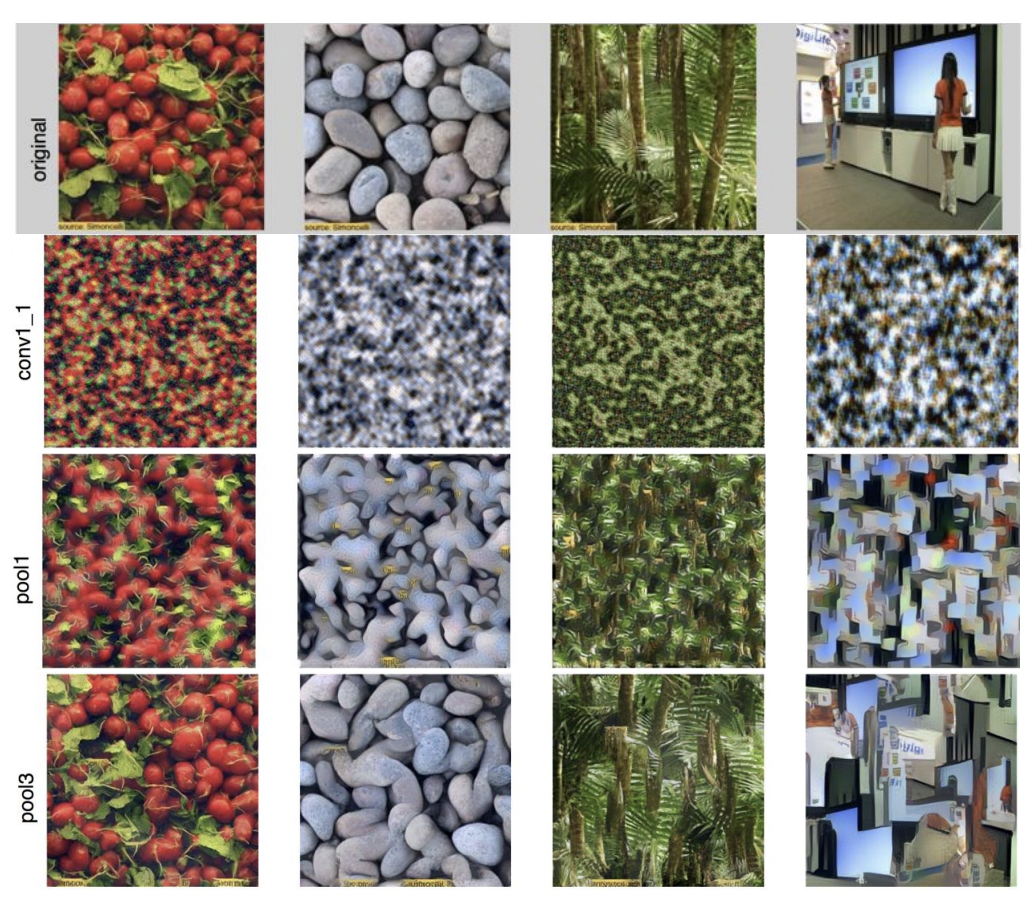
1. input texture를 가지고 CNN에 넣습니다.
2. 어떤 layer에서 convolution된 feature CxHxW를 가져옵니다.
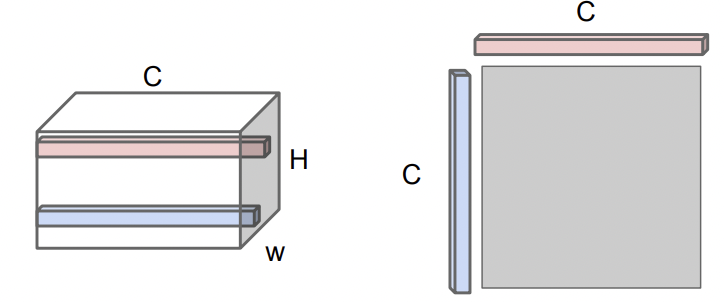
HxW는 spatial grid로 생각할 수 있고, HxW의 한 점마다 C dimension의 vector를 지닙니다.
이 C vector는 이미지의 해당 지점에서 어떤 형상을 띄는지에 대한 정보를 rough하게 담고 있습니다.
3. 그래서 이 convolution feature에서 C vector 두개를 선택하고, 외적을 진행해서 CxC matrix를 만듭니다.
이 CxC vector는 특정 포인트 두점에서 공통적으로 발현되는 성질에 대한 정보를 담고 있습니다.
4. 이 CxC matrix를 모든 point에 대하여 만들고 average 하면 gram matrix가 생성됩니다.
Gram matrix는 input image의 texture의 정보를 담는 일종의 descriptor역할을 합니다.
* Gram Matrix는 average과정에서 spatial information을 다 버렸습니다.
* 모든 경우의 수를 다 구해서 computation complexity가 되게 별로일거 같지만, Cx(HW)와 Cx(HW)의 Transpose를 곱하면 되므로 계산이 오히려 굉장히 수월합니다.
이제 구한 descriptor를 가지고 아래의 neural process를 거치면 Neural Texture Synthesis가 완성됩니다.!
Neural Style Transfer
'cs231n > 내용 정리' 카테고리의 다른 글
| cs231n - 13강 - Generative Models (0) | 2021.07.18 |
|---|---|
| cs231n - 11강 - Detection and Segmentation (1) | 2021.07.07 |
| cs231n - 10강 - Recurrent Neural Networks (0) | 2021.07.02 |
| cs231n - 7강 - Training Neural Neworks II (0) | 2021.06.23 |
| cs231n - 6강 - Training Neural Networks I (0) | 2021.06.23 |